

En el mundo de la robótica, los ingenieros y científicos han buscado constantemente inspiración en la naturaleza para diseñar sistemas cada vez más avanzados y capaces. Ahora, un equipo de la Universidad de California en Berkeley ha dado un gran paso al crear un robot inspirado en las extraordinarias habilidades de las ardillas.
El Reto de Imitar la Agilidad de las Ardillas
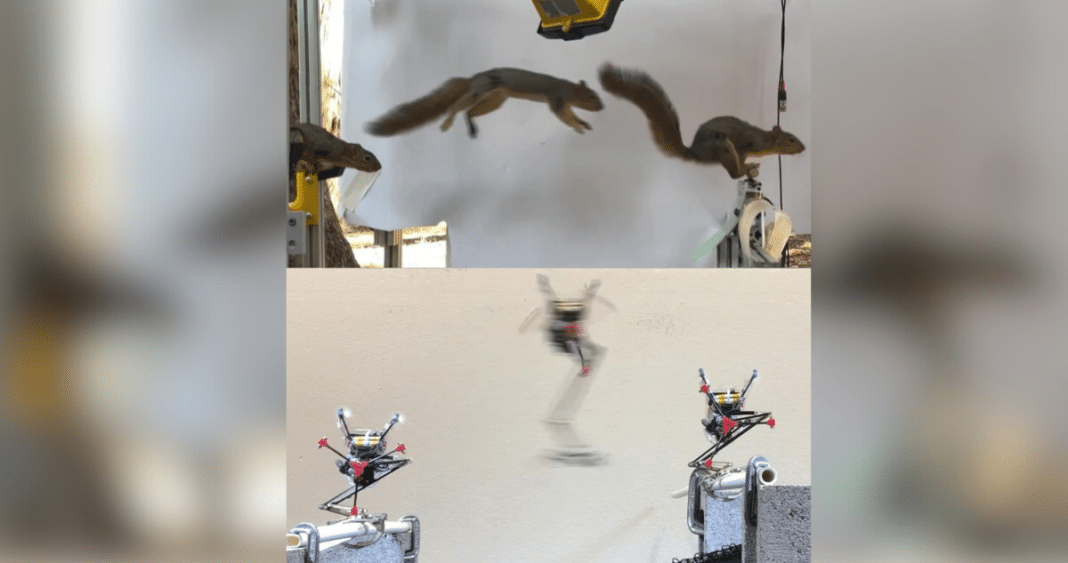
Las ardillas son consideradas los «atletas de la naturaleza» por su increíble capacidad de maniobrar y escapar con agilidad entre las ramas de los árboles. Replicar estas hazañas en un robot ha sido un desafío importante para los investigadores, quienes buscaban definir las estrategias de control que utilizan las ardillas para lograr estos movimientos tan precisos.
Gracias a sensores y videos, los científicos descubrieron que las ardillas absorben hasta el 86% de la energía cinética con sus patas delanteras, ajustando la fuerza de frenado para mantener el equilibrio al aterrizar.
Rediseñando un Robot de Una Sola Pata
Inspirados en estas observaciones, el equipo liderado por Justin Yim rediseñó un robot de una sola pata desarrollado previamente en la Universidad de California. Este robot, llamado «Salto», ya era capaz de saltar y hacer «parkour» en terreno plano, pero el reto era lograr que aterrizara de manera erguida y equilibrada sobre una viga estrecha.
A diferencia de los simios, que dependen de un fuerte agarre, las ardillas pueden mantener el equilibrio erguido después de saltar gracias a un control preciso de las fuerzas a lo largo de sus patas. Así, los investigadores diseñaron un enfoque para que el robot «Salto» pudiera lograr aterrizajes estables sin necesidad de una gran fuerza de agarre.
Experimentos y Resultados Prometedores
En las pruebas realizadas, el robot «Salto» equipado con una pinza ligera en la punta del pie logró saltar y aterrizar con éxito en 25 de 30 intentos. En 2 de esos intentos, el robot mantuvo un aterrizaje erguido y equilibrado, mientras que en los otros casos se agarró a la rama y se balanceó por encima o por debajo de ella.
Si bien el robot aún necesita mejorar su control del equilibrio, estos resultados demuestran un gran avance hacia el diseño de robots más ágiles y versátiles, capaces de moverse con seguridad en entornos complejos, como construcciones en proceso, bosques enmarañados o incluso en futuras misiones de exploración lunar.


{kind=link}